

用渦街流量計和渦輪流量計響應函數控制氣液分
摘要:油井產出液的分離計量精度主要是受氣液分離程度的影響。 本文提出利用渦街流量計和渦輪流量計的響應函數來控制氣液分離, 其控制算法是基于BP 網絡的改進的 PID 控制算法, 可以滿足油井產出液的計量要求。 經過現場試驗, 該控制算法取得很好的效果。
0 、引言從:
油井產出的流體很少是單一的液體或是氣態的碳氫化合物, 大多為多相混合流。***簡單的組成形式是一種天然氣和油水的混合物 。要計量油井的產量和分相含率 , 可采用分離計量的方式 。混合流體經過氣液分離后, 利用成熟的單相流測量技術和相分率測量技術計量, 因此計量的不確定度主要受氣液分離程度的影響 。基于此問題, 本文提出了利用渦街流量計和渦輪流量計的響應函數混合控制氣液分離器 。
1 、工作原理:
渦街流量計是利用流體振動原理來進行流量測量的 。即根據旋渦脫離旋渦發生體的頻率與流量之間的關系來測量流量的儀表。而渦輪流量計屬于葉輪式速度流量計的一種, 其工作原理是 :置于流體中的葉輪的旋轉角速度與流體流速成正比, 通過測量葉輪的旋轉角速度就可以得到流體的流速, 從而得到管道內的流量值。渦街流量計在計量氣液兩相流時,由于流體中含有氣泡 ,使旋渦的脫落不穩定 ,也不易形成穩定的渦街 ,當含氣率增大到一定程度時 ,將不能形成渦街 。渦輪流量計在測量氣液兩相流時,由于氣相比液相的速度高, 所以測量結果增大 。在氣液分離時利用渦街流量計和渦輪流量計的響應函數來控制氣液分離器將很好的減小測量的誤差 。
但是以往的 PID 控制要取得較好的控制效果, 就必須通過調整好比例、積分和微分三種控制作用 ,形成控制量中既相互配合又相互制約的關系, 這種關系不一定是簡單的“線性組合” , 從變化無窮的非線性組合中可以找出***佳的 PID 控制 。神經網絡所具有的任意非線性表達能力, 可以通過對系統性能的學習來實現具有***佳組合的 PID 控制 。采用 BP 網絡, 可以建立 kp , ki , kd 自學習的PID 控制。所以利用基于 BP 神經網絡的改進 PID 控制算法來控制氣液分離器 ,可以達到混合流體的計量。
基于 BP(Back Propagation)網絡的 PID 控制系統結構如圖 1 所示 ,控制器由兩部分構成:
1)改進的 PID 控制器 , 直接對被控對象進行閉環控制, 并且三個參數 kp, ki, kd為在線調整方式 ;
2)神經網絡 , 根據系統的運行狀態 , 調節 PID控制器的參數 ,以期達到分離性能指標的***優化 ,使輸出層神經元的輸出狀態對應于 PID 控制器的三個可調參數 kp, ki, kd通過神經網絡的自學習 、加權系數調整 ,使神經網絡輸出對應于某種***優控制律下的 PID 控制器參數 。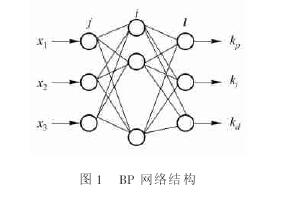

圖 1 BP 網絡結構
增量式數學 PID 控制算法為u(k )=u(k -1)+kp(error(k)-error(k -1))+kier ror (k )+ kd (er ror (k )-2er ror (k -1)+error (k -2))式中, kp, ki, kd分別為比例 、積分 、微分系數 , error為輸入與輸出之間的偏差 。
采用三層 BP 網絡 , 其結構如圖 1 所示 。網絡輸入層的輸入為O(1)j=x(j) j =1 ,2 , …M (2)
式中, 輸入變量的個數 M 取決于被控系統的復雜程度 。
網絡隱含層的輸入、輸出分別為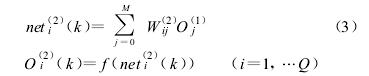
式中 , W(2)ij為隱含層加權系數;上角標(1)、(2)、(3)分別代表輸入層 ,隱含層和輸出層 。隱層神經元的活化函數取正負對稱的函數

網絡輸出層的輸入、輸出分別為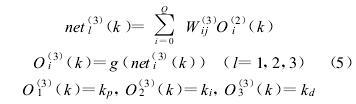
輸出層輸出節點分別對應三個可調參數 kp ,k i , kd。由于 kp, ki, kd不能為負值, 所以輸出層神經元的活化函數取非負的 sigmoid 函數
由于 y (k)/ u (k)未知 , 所以近似用符號函數sgn y(k)/ u(k) 取代 , 由此帶來計算不的影響可以通過調整學習速率 η來補償。由式(1)和(5),可求得
基于 BP 網絡的改進 PID 控制器結構如圖 2 所示, 該控制器的控制算法歸納如下 :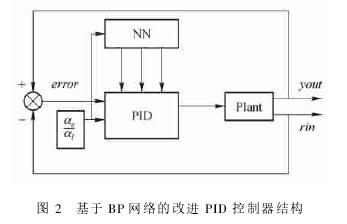
圖 2 基于 BP 網絡的改進 PID 控制器結構
1)確定 BP 網絡的結構 , 即確定輸入層節點數M 和隱含層節點數 Q , 并給出各層加權系數的初值W1li(0)和 W2li(0),選定學習速率 η和慣性系數 α,此時 k =1 ;2)采樣得到 rin(k)和 yout(k),計算該時刻誤差 error(k)=rin(k)-yout(k);3)計算神經網絡 NN 各層神經元的輸入 、輸出, NN 輸出層的輸出即為 PID 控制器的三個可調參數 kp, ki, kd;4)根據式(1)計算PID 控制器的輸出 u(k);5)進行神經網絡學習 ,在線調整加權系數 W1ij(k)和 W2li(k),實現 PID 控制參數的自適應調整;6)置 k =k +1 ,返回到 1)。
2 、應用實例:
神經網絡的結構選 4 -5 -3 , 學習速率 η=0.28 和慣性系數 α=0.04 , 加權系數初始值取區間[ -0.5 ,0.5] 上的隨機數 。輸入指令信號為采樣得到的一路渦街流量計的信號。輸出信號取渦輪流量計的信號 。在大慶油田現場測量油井產出液的分離過程如圖 3 所示 。
從圖 3 中可以看出, 氣液分離前渦輪流量計由于混合流體中氣體的存在 , 使得響應出現很大的尖峰,尖峰出現的時刻與渦街流量計響應出現谷底的時刻一致。經過氣液分離后 , 渦街和渦輪流量計的響應基本相等, 變化趨勢一致 。

3 、結論:
1)通過渦街流量計和渦輪流量計的響應函數來控制氣液分離 ,可以實時監測調整,達到完全分離的目的;
2)基于 BP 網絡的改進 PID 控制算法可以有效的實現對氣液分離的實時控制。
3)通過完善算法 ,可以提高氣液分離的控制精度;4)現場試驗證明 ,此方法達到了計量的要求, 具有良好的應用前景。