

基于自動代碼生成技術的智能渦輪流量計傳感器
0 引言
作為航空發動機控制主要的發展方向, 分布式控制系統[1]將低級處理功能從FADEC中的電子控制器EEC (electronic engine control) 下放到現場的傳感器和作動器中, 使之成為智能傳感器和智能作動器, 同時通過數據總線實現與EEC的實時通訊。
航空發動機通過燃燒燃油[2]產生熱量來做功, 為飛機提供動力。因此, 燃油流量的測定, 對發動機的實時狀態監測與控制非常重要。目前, 普遍采用電磁式渦輪流量傳感器進行燃油流量測量[3]。然而, 這種電磁式傳感器不僅易受強電磁的干擾, 無法在惡劣工況下使用, 而且當渦輪轉子轉速較低時, 葉片會產生磁阻, 導致電磁式流量傳感器的量程比不會太大。而光纖傳感器[4]通過光纖來實現信號的測量和傳送, 具有優良的抗干擾能力, 特別適用于強電磁干擾和高壓的環境, 且當渦輪轉速較低時, 光纖渦輪流量計不受磁阻的影響, 因此相對于電磁式傳感器, 光纖傳感器具有更大的量程比。
單片機的運算速度慢、功能單一, 其不能滿足分布式控制智能傳感器的要求。DSP將高速運算能力、實時處理能力和控制器外設等功能集于一身, 使很多復雜的控制算法和功能得以實現。然而, 目前的DSP軟件開發, 都是以編寫復雜的匯編或C語言代碼為整個軟件開發周期的核心, 需要投入大量的人力、物力、財力。TI公司和Mathworks公司合作搭建的嵌入式開發環境Embedded Target for TI's C2000/C5000/C6000DSP Platform和接口工具MATLAB Link for CCS Development Tools為自動代碼[5]的生成提供了方便, 使快速代碼生成逐漸成為DSP代碼開發研究的重點。
本文選用光纖作為傳感器材料, TMS320F28335DSP作為智能渦輪流量傳感器的微處理器, 利用自動代碼生成技術實現嵌入式軟件的開發, 設計了一種航空發動機智能渦輪流量傳感器。該傳感器抗干擾能力強、精度高、范圍廣, 適合于分布式控制系統。
1 光纖渦輪流量傳感器測量原理
光纖流量傳感器是把電磁流量傳感器的電磁式感應部件替換成光纖感應探頭, 使用光纖探頭代替電磁線圈完成信號拾取, 一般可將光纖束分為2支, 分別作為發射光纖和接收光纖。光源通過發射光纖照射到葉片端面上, 且照射到渦輪葉片上的位置隨渦輪葉片的轉動而發生周期性的改變, 這樣通過反射進入接收光纖的光強信號就會產生周期性的變化。將接收到的光信號傳輸至光電轉換電路, 然后經過放大和濾波, 就能得到周期性的電信號。假定測出電信號的頻率為fn, 渦輪葉片數為n, 則渦輪轉動頻率f=fn/n。***后根據流量和頻率對應關系, 求出渦輪燃油流量。
根據上述測量原理, 其核心在于測量電信號的頻率。測量頻率方法主要有測頻法和測周法。然而這2種方法在整個頻率測量范圍內, 尤其是低頻條件下, 容易受到環境條件的影響, 無法獲得較高的精度。
FFT測頻算法是將時域離散信號變為頻域離散信號, 然后根據各頻率的分布情況和幅值大小來計算頻率。這種算法可靠性高、魯棒性強, 能夠有效防止信號的干擾, 并且可以通過插值法對傅里葉系數進行修正來提高分辨率[6], 因此本文采用修正的FFT算法進行頻率測定。
本文以DN20型號的渦輪流量傳感器為研究對象, 設定光纖傳感器的可測渦輪頻率范圍為5~300 Hz, 使其量程比可達60∶1, 渦輪葉片數目為4, 即測定的電信號頻率范圍為20~1 200 Hz。
2 智能渦輪流量傳感器系統硬件組成
本文提出的智能渦輪流量傳感器系統結構框架如圖1所示, 可具體分為光纖傳感器和光纖后處理硬件電路2部分, 下面分別進行介紹。
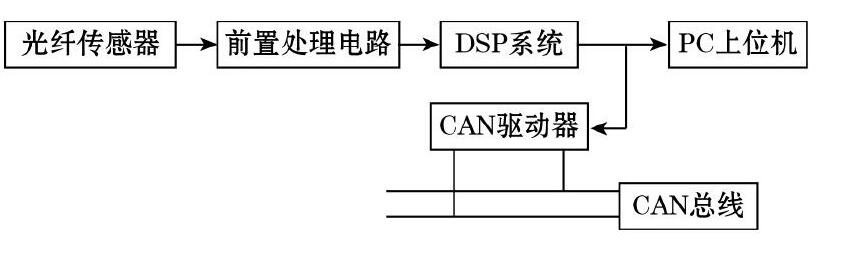

圖1 智能渦輪流量傳感器系統框圖
2.1 光纖傳感器
本文采用的同軸式光纖傳感器是由光源、發射光纖、接收光纖以及探測器組成。同軸式光纖傳感器的光纖探頭的截面圖如圖2所示。中間1根光纖為發射光纖, 周圍一圈6根光纖為接收光纖。本文接收光纖采用多模光纖[7], 可以提高測量的信噪比, 從而實現傳感器高精度測量。
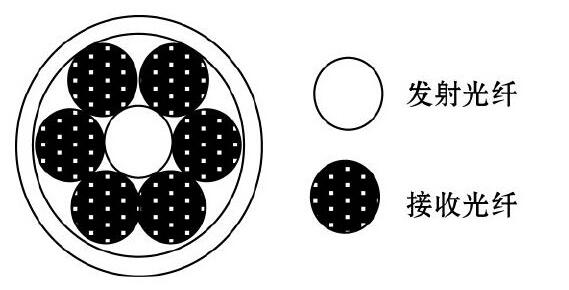
圖2 光纖探頭光纖束排列方式
先將光纖探頭安裝固定在待測渦輪葉片頂部的機匣處, 并使得光纖的端面正對渦輪葉片;激光光源發出激光輸入到光纖探頭中的發射光纖中, 發射光纖中的激光照射到葉端表面后反射到光纖單元中的接收光纖中。
根據光強調制原理, 結合圖2的光纖探頭結構, 設定任意一對發射光纖和入射光纖的距離為d, 則接收光纖接收到的光強I (z) 與光纖探頭距離渦輪葉片反射面的位移z滿足式 (1) 所示的函數關系[8]。
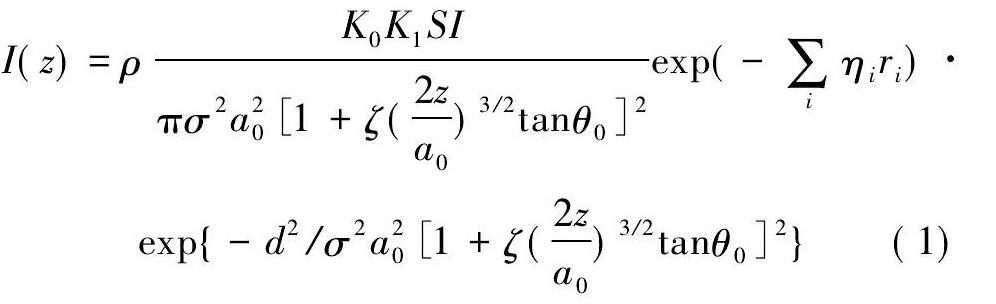
式中:ρ為鏡面的反射率;K0為光波在入射光纖中的損耗;K1為接收光纖的光功率損耗系數 (本征損耗) ;S為光纖有效接收面積, μm2;I為由光源耦合到入射光纖中的光強;σ為表征光纖折射率分布的相關參數;ζ為與光源有關的調制參數。
可見, 在探頭參數確定的情況下, 光強I (z) 只與位移z有關。渦輪轉動時, 每個葉片掃過光纖瞬間, 光纖探頭到光纖端面的距離z***大, 對應I (z) 有極大值, 因此I (z) 為一個周期信號。
2.2 基于DSP的光纖后處理硬件電路
2.2.1 前置處理電路
這部分電路包括光電轉化模塊和放大濾波模塊, 完成輸入DSP系統前的信號處理。光電轉化模塊的功能是將反射光纖接收到的光信號轉換為電壓信號;放大濾波模塊的功能是將光電轉換后輸出的微弱電壓信號進行適度放大, 使其在0~3 V的范圍內, 并使一定頻率范圍內的信號通過, 抑制其他頻率信號, 提高系統的信噪比, 經過前置處理電路的信號***終輸入到DSP系統的ADCINA0端。
2.2.2 TMS320F28335 DSP結構及特點
TMS320F28335 DSP具有150 MHz的高速處理能力, 具備32位浮點處理單元, 有以下特點:低功耗設計, 1.8 V內核電壓, 3.3 V引腳電壓;12位16通道ADC, 轉換時間為80 ns;256 K×16位Flash存儲器, 34K×16位RAM, 1 K×16位ROM;2個e CAN2.0B模塊;3個SCI模塊。F28335得益于浮點運算單元, 其性能相比于F2812平均提高了50%, FFT等復雜算法運算周期縮短了一半。
2.2.3 上位機顯示
為了與計算機連接實現遠程測控, 可以使用RS232接口與上位進行連接, 實現異步串行通信, 實現將DSP端的數據實時傳輸給PC端[9]。
2.2.4 DSP與CAN總線的接口電路
CAN總線[10]是現場總線中的一種, 采用總線拓撲結構和同層通信方式, 有5種錯誤監測和糾錯措施, 具有很高的可靠性;***高位傳輸率達1 Mbit/s, 接口簡單, 成本低廉, CAN的這些優點使其成為分布式控制系統數據總線的理想選擇。TMS320F28335 DSP內嵌CAN控制器———e CAN模塊, 本文采用82C250作為CAN收發器將DSP芯片與物理總線的接口相連, 實現了DSP與CAN總線的接口電路。
3 智能渦輪流量傳感器系統軟件實現
3.1 基于MATLAB-DSP的自動代碼生成技術
隨著近年來DSP被廣泛地應用于各個領域, DSP的軟件開發方法也在不斷地發展, 目前主要的3種開發方法如表1所示。為了降低DSP程序開發難度并標準化生成的DSP程序, 同時有效利用MATLAB軟件開發周期短以及匯編代碼執行效率高的優勢, Texas Instruments和Mathworks公司共同推出了一個嵌入式軟件的開發環境ETTIC2000/5000/6000和其對應地接口工具CCSLink。
表1 DSP程序設計方法性能比較 下載原表

CCSLink是MATLAB中的一個工具箱, 它提供了MATLAB、CCS和DSP目標板之間的接口, 利用這個工具箱可以使用Real-Time-Workshop將Simulink模型生成標準的C程序代碼, 然后調用CCS開發工具編譯鏈接這些C代碼, 生成指定目標板的可執行代碼, ***終把生成的代碼加載到目標板中進行算法性能和實時性評估。目前的MATLAB集成了ADC、PWM、SCI、CAN等多種功能模塊, 為用戶的開發和應用提供了很大的便利[11]。
3.2 流量測定Simulink模型的搭建
智能化軟件系統的流程圖如圖3所示。該系統主要包括數據采集模塊、FIR數字濾波模塊、FFT測頻模塊、頻率流量轉化模塊、上位機顯示模塊和CAN通信模塊, 由于本文采用自動代碼生成技術完成嵌入式軟件的開發, 因此上述模塊都是在MATLAB/Simulink的環境下搭建的, 其中FFT測頻模塊是整個軟件系統的核心部分。
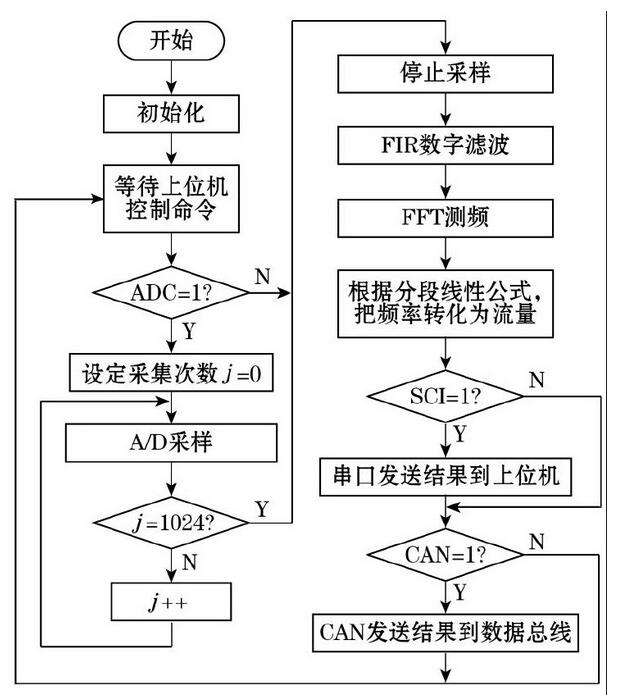
圖3 智能化軟件系統的流程圖
3.2.1 數據采集模塊
F28335內部的ADC模塊具有12位分辨率, 共有16個采樣通道, 本論文使用ADCINA0通道, 采用相對***穩定的e PWMx A觸發中斷來啟動ADC, ADC工作方式選擇級聯模式。
根據香農采樣定理, 采樣頻率應大于信號頻率的2倍, 由上文可知, 待測量的光信號的頻率為20~1 200 Hz, 因此采樣頻率應不小于2 400 Hz。本文采用基于FFT的測頻方法, 隨著采樣頻率升高, 測頻結果的分辨率會降低, 因此設置采樣頻率為2 500 Hz。在Texas Instructions C2000/C28x3x模塊庫里找到ADC模塊和e PWM模塊, 并根據上述參數進行設置。
本論文中采樣點數N設定為1 024, 即對于后續的FIR數字濾波模塊和FFT測頻模塊都是以1 024個采樣點為一組輸入進行信號處理。使用Stateflow/chart控制采樣點數, 將采樣數據存儲在Data Store Memory模塊, 當采到1 024個點后置零, 并通過Software Interrupt Trigger模塊進入中斷, 執行后續動作, 依次循環。
3.2.2 FIR數字濾波模塊
本文選用FIR算法實現低通濾波。在FIR濾波器中可以得到的線性相位, FIR濾波器采用非遞歸結構, 不存在穩定性問題, 頻率特性誤差也較小。通過軟硬件濾波方法相結合, 使該傳感器魯棒性更強、流量測定更準確。
首先確定濾波器的階數。綜合考慮計算精度和實時性, ***終選擇的濾波器的階數為32階。當前時刻以及***近32個時刻的輸入在數據采集程序中已經得到, 所對應的沖擊響應的值可以根據濾波器的截止頻率采用漢明窗窗函數法計算得到。本系統中所要測量的光信號的頻率范圍為20~1 200 Hz, 因此將頻率截止頻率設為1 250 Hz。***后根據上述參數, 配置Filter Designs模塊庫的Digital Filter Design模塊。
3.2.3 FFT測頻模塊
FFT算法得到的頻率分辨率為

式中:fs為采樣頻率;N為采樣點數。
上文已經提到, 取 , N=1 024, 因此頻率分辨率為
, N=1 024, 因此頻率分辨率為

本文設計了一種通過插值的方法對傅里葉系數進行修正來提高分辨率的DSP算法。基本的思路是首先通過FFT對信號頻譜進行全局峰值搜索, 然后采用重心法得到峰值的偏差初值, 再迭代計算修正峰值前后兩個位置的DFT系數來實現對真實頻率的估計, 保證了誤差在0.05范圍內。該算法的主要步驟如下:
(1) 對信號X (k) 做FFT運算, 取模后得到信號頻譜|X (k) |, 再對頻譜峰值進行搜索, 得到峰值的位置L。
(2) 由式 (2) 計算偏差初值error (0) , 初始值n=1。
式中M為主瓣內的峰值位置前后的譜線數。
(3) 由式 (3) ~式 (5) 計算得到第n次的偏差修正值Δerror (n) , 加上第n-1次偏差值error (n-1) 得到第n次的偏差值error (n) , 且n=n+1;
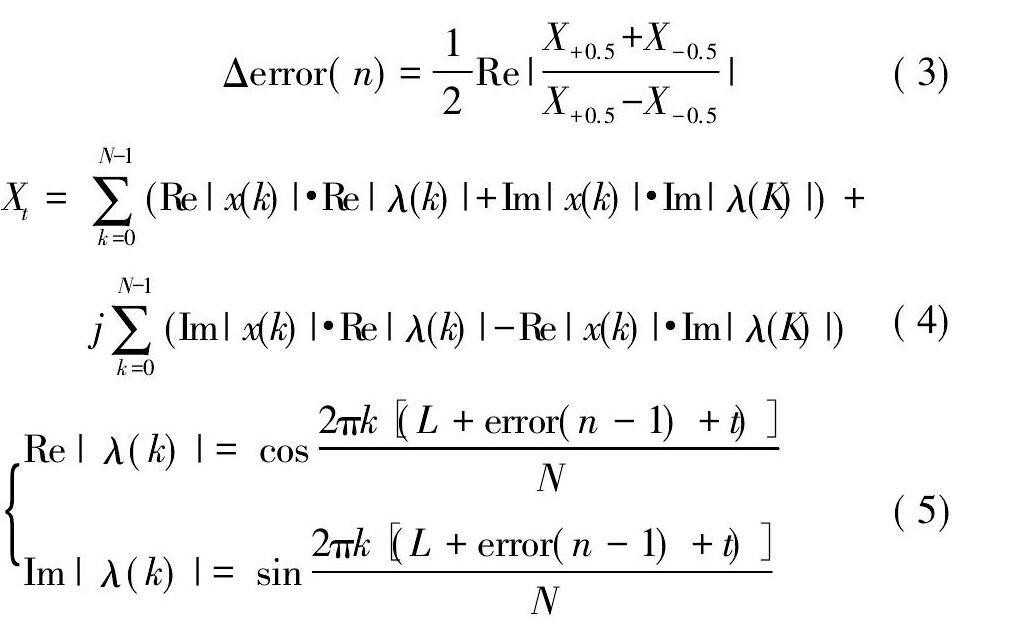
(4) 重復步驟 (3) , 直到error (n) ≤0.05, 由式 (6) 求出真實的頻率:
式中fx為采樣頻率。
(5) 因為渦輪葉片數為4, 故渦輪轉動頻率 。
。
由于MATLAB中的FFT模塊并不是開源的, 不能直接修改, 為了實現上述測頻算法, 本文利用Embedded MATLAB Function模塊對修正的FFT算法進行封裝, 得到一個能夠直接使用的Simulink模塊。
3.2.4 頻率流量轉化模塊
為了求出渦輪頻率f與渦輪流量Q之間的關系, 本文根據DN20型號的渦輪流量傳感器構建了對應的Simulink仿真模型, 并進行了軟件仿真, 得出了如表2所示的頻率和流量的分段線性化關系[12]。
表2 智能傳感器頻率流量分段線性化關系 下載原表
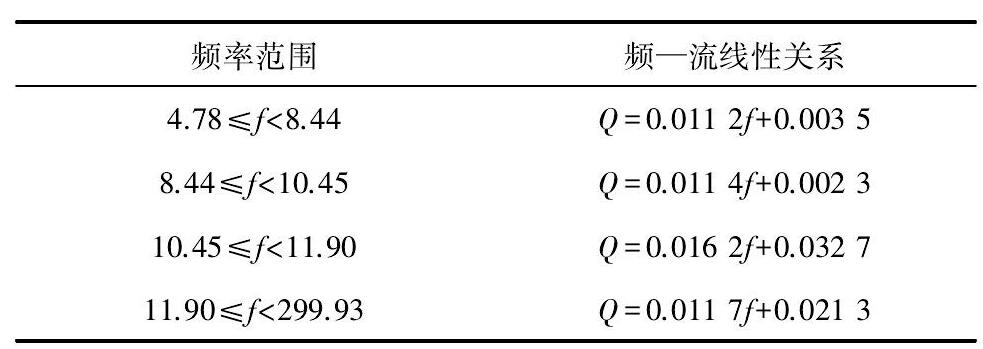
同樣利用上述的Embedded MATLAB Function模塊, 根據分段線性關系, 完成頻率-流量的轉化, 實現燃油流量的測定。
3.2.5 上位機顯示模塊及CAN通訊模塊
為了實現轉速的實時顯示, 同時方便傳感器地面試驗時遠距離測控, 本文選用異步串行通訊方式, 實現了DSP與上位機之間的數據交互。本文選擇的波特率為11 520 bit/s, 完全能夠滿足實時顯示的要求。在Simulink庫中找到SCI Transmit模塊, 并按照上述參數對該模塊進行設置。在電腦端選用通信端口COM1, 將其波特率設置為相同的11 520 bit/s。為了能夠實時顯示, 本文利用Labwindows/CVI軟件搭建了顯示流量的人機界面, 方便轉速在PC端的實時顯示。
CAN2.0B中存在2種不同的幀格式, 本文采用具有11位標識符的標準幀[13], 波特率250 kbit/s。ID標識符由ID25-ID18構成, ID標識符的分配采用“目的標識+信號標識+命令標識”, 結構層次清晰。目前節點需要傳輸的信號只有渦輪燃油流量1個參數, 因此設置Data1的ID為00, 并預留出2位 (ID22-23:00) 便于分布式系統結構的擴展。在Simulink庫中找到e CAN Transmit模塊, 并按照上述參數對該模塊進行設置。
3.3 嵌入式軟件自動代碼生成
將上述各個模塊結合起來, 構成如圖4所示的完整的智能渦輪流量傳感器系統Simulink模型。對該模型的Configuration Parameters參數進行設定, 并將基于DSP的處理硬件電路與PC機相連接后, 完成自動代碼生成過程, 將上述模型轉化C程序, 下載到DSP硬件電路板中, 實現了嵌入式軟件的開發。

圖4 智能渦輪流量傳感器系統Simulink模型 下載原圖
4 實驗驗證
本文對所設計的航空發動機智能渦輪流量傳感器系統進行實驗驗證, 首先將所設計的測量系統軟件下載到集成電路中進行軟件硬件的聯調實驗驗證測量精度與測量范圍;然后以水為介質, 同時做電磁式渦輪流量計與光纖渦輪流量計對比實驗, 驗證了整個光纖渦輪流量計的測量精度及測量范圍達到了預期的效果。
4.1 軟硬件聯調實驗
對光纖渦輪傳感器進行了單獨實驗驗證。利用一個電機可調轉速的渦輪轉子, 渦輪上方裝有2.1節所述的光纖傳感器。電機的轉動頻率可得到, 光纖渦輪流量計測量的轉動頻率實時地顯示在PC主機上, 試驗結果如表3所示, f0為實際頻率, f1為測量頻率, e1為誤差, e2為相對誤差。
表3 測量頻率與誤差實驗數據表 下載原表
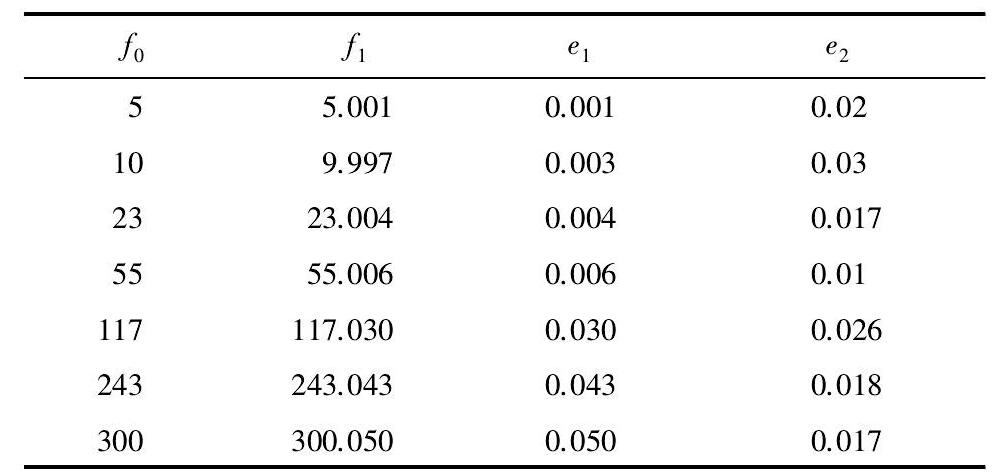
可見, 該光纖渦輪流量傳感器在測量范圍內, ***大的相對誤差為0.03%, 完全滿足發動機測量精度的要求。
4.2 流量計對比實驗
在同一個實驗環境下, 在DN20的渦輪的基礎上, 同時使用光纖流量傳感器和電磁流量傳感器測流量, 如圖5所示, 對二者的測量結果進行對比分析。

圖5 流量對比實驗圖 下載原圖
渦輪流量傳感器的流量上限的限制主要取決于渦輪軸承的壽命, 而本文所開發的光纖渦輪流量傳感器, 其渦輪部分仍是原來的電磁渦輪流量傳感器的渦輪部分, 因此其上限與原渦輪流量傳感器保持一致, 本文不進行相關實驗, 只在頻率小于35 Hz的條件下進行對比實驗驗證, 得到如圖6所示的實驗結果。
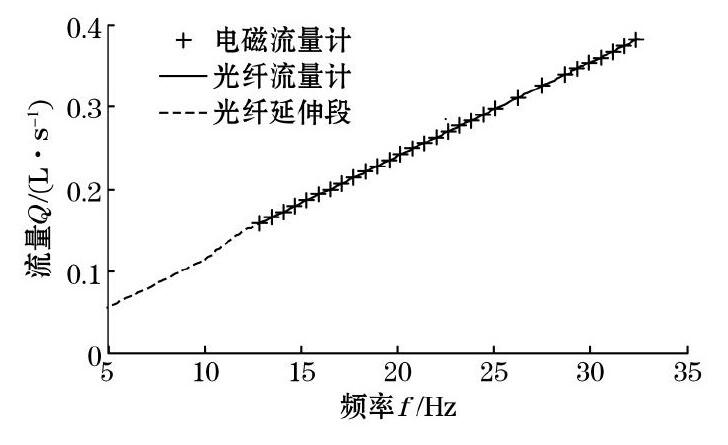
圖6 流量對比實驗結果圖 下載原圖
根據實驗結果可以看出, 在電磁渦輪流量計的有效測量范圍內, 光纖渦輪流量計測量數據相應地與電磁渦輪流量計的測量數據重合一致, 這證明光纖測量結果是完全正確;并且光纖渦輪流量計的流量測量范圍向下延伸了, 在保證測量精度的同時將測量范圍擴展至測點 (f=4.73 Hz, Q=0.057 3 L/s) , 保持原渦輪流量計的測量上限點 (f=309.33 Hz, Q=3.549 68 L/s) 不變, 光纖渦輪流量計的量程比可以提高至63∶1。
5 結論
本文設計了一種以光纖傳感器與DSP為硬件核心的航空發動機分布式智能渦輪流量傳感器, 并采用自動代碼生成技術完成嵌入式軟件的開發, 對軟硬件進行了聯合仿真實驗, 并與電磁渦輪流量計進行了對比。主要成果如下:
(1) 提出了一種基于光纖傳感器和DSP硬件的智能渦輪流量傳感器, 并針對分布式控制結構, 設計了對應的智能算法和CAN口通訊, 該傳感器抗干擾能力強、測量精度高, 可實現SCI串行通訊、CAN通訊等多種通信功能;
(2) 采用基于MATLAB-DSP的自動代碼生成技術, 利用簡單的Simulink模型實現了復雜的嵌入式軟件的開發, 縮短了開發周期, 生成的軟件系統經過驗證完全滿足實際要求, 效果良好;
(3) 驗證了所設計的智能渦輪流量傳感器的測量精度, 與電磁渦輪流量傳感器相比, 明顯延伸了測量下限, 顯著提高了量程比。
本研究為智能傳感器的工程應用提供了有效的途徑, 為航空發動機光纖渦輪流量傳感器的有效性檢驗提供了實驗驗證支持, 促進了航空發動機分布式控制領域的研究工作。