

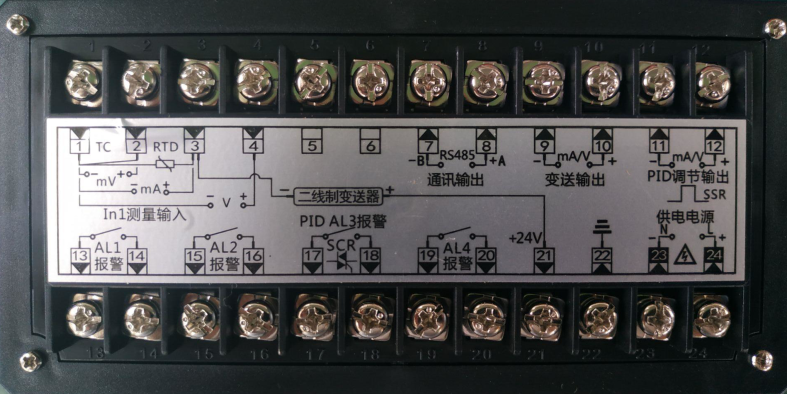
智能PID流量調(diào)節(jié)控制儀器
流量調(diào)節(jié)控制儀與流量計和調(diào)節(jié)閥一起配合使用,可以實現(xiàn)介質(zhì)瞬時流量大小自動控制。主要采用繼電器調(diào)節(jié)控制、S S R電平調(diào)節(jié)控制、電流模擬量調(diào)節(jié)控制。
調(diào)節(jié)儀表內(nèi)置 2 個繼電器,每個繼電器的報警值、上下限報警功能、報警回差可分別設定,可設置報警延遲與首次上電抑制功能。儀表可自定義操作員菜單、設定值上下限幅、
控制輸出上下限幅、控制輸出上限有效范圍、控制回差等,以實現(xiàn)不同用戶的使用需求。此外,儀表帶繼電器報警控制輸出、模擬量調(diào)節(jié)控制輸出、 儀表異常變送輸出選擇等多種輸出功能,帶雙屏高亮度數(shù)碼管顯示。


技術(shù)參數(shù)
測量精度:±0.3%FS
控制精度:±0.5%
信號輸入:4-20ma輸入
控制輸出:模擬量4-20ma輸出,JZC繼電器輸出,容量:AC220V/3A,DC24V/3A。
報警輸出:帶上下限報警功能,可以設置回差。
工作電壓:開關(guān)電源AC/DC 110~240V,頻率50/60HZ,功耗≤5W,開關(guān)電源:DC12-36V, 功耗≤3W。
使用環(huán)境:-10~50℃。

PID 是比例、積分、微分的簡稱,PID 控制的難點不是編程,而是控制器的參數(shù)整定.參數(shù)整定的關(guān)鍵是正確地理解各參數(shù)對控制系統(tǒng)的影響.在系統(tǒng)性能不能令人滿意時,知道應該調(diào)節(jié)哪一個參數(shù),該參數(shù)應該增大還是減小.由于受實驗限制,再加上多媒體課件的局限,學生對PID 控制的過程感覺很抽象,分析起來有一定的困難.詳細分析了 PID 控制器的基本作用,并將MATLA/SIMULINK 應用到教學中,通過對 PID 控制系統(tǒng)進行仿真,直觀地展現(xiàn)了各參數(shù)變化對過渡過程的影響自從有了PID 控制,參數(shù)對過渡過程的影響就一直是人們研究的問題之一.處于平衡狀態(tài)下的自動控制系統(tǒng)受到干擾作用后,被控變量會發(fā)生變化而偏離給定值,系統(tǒng)進入過渡過程.自動控制的作用就是檢測變化、計算偏差并消除偏差.在這一過程中,被控變量的變化情況、偏離給定值的最大程度以及系統(tǒng)消除偏差的速度、精度等都是衡量自動控制系統(tǒng)質(zhì)量的依據(jù).
各種參數(shù)的作用,其變化是如何影響控制系統(tǒng),理論的講解晦澀難懂.若將 MATLAB/SIMULINK 對控制系統(tǒng)仿真引入教學中,針對不同參數(shù)的仿真比對,直觀地反映了各參數(shù)對控制過程的影響,便于分析。
1 PID 控制系統(tǒng)原理及算法
比例-積分-微分(Proportional-Integral-Derivative,PID)是在工業(yè)過程控制中最常見、應用最為廣泛的一種控制策略,它是在上世紀 20 年代對船舶自動導航的研究中提出的.到上世紀 40 年代,PID 控制器已在過程控制中得到了廣泛的應用.盡管許多先進控制算法不斷推出,但 PID 控制器由于結(jié)構(gòu)簡單、實現(xiàn)容易、魯棒性較強的優(yōu)點,被廣泛應用于各種工業(yè)過程控制中.正確使用、合理設計PID 參數(shù)可改善控制性能.
1.1 PID 控制系統(tǒng)原理及算法
1.1.1 PID 控制系統(tǒng)原理 其原理見圖 1.
1.1.2 PID 控制系統(tǒng)算法 PID 控制器主要是依據(jù)給定值 r(t ) 與實際輸出值 y(t )構(gòu)成控制偏差,用公式表示,即e(t ) = r(t)- y(t ).
PID 的控制規(guī)律
1.2 PID 控制器各環(huán)節(jié)的作用
1.2.1 比例環(huán)節(jié) 成比例地反映控制系統(tǒng)的偏差信號e(t ) ,偏差一旦產(chǎn)生,控制器立即產(chǎn)生控制作用,以減小偏差.因為比例調(diào)節(jié)器的輸出變化量與輸入偏差是一一對應的,所以控制及時,其中 Kp 的大小決定了比例控制的強弱.
1.2.2 積分環(huán)節(jié) 主要用于消除余差,提高系統(tǒng)的無差度.積分作用的強弱取決于積分時間常數(shù)Ti ,Ti 越大,積分作用越弱,反之則越強.
1.2.3 微分環(huán)節(jié) 根據(jù)偏差信號的變化趨勢來進行調(diào)節(jié),并能在偏差信號變得太大之前,開始調(diào)節(jié),從而加快系統(tǒng)的動作速度,減少調(diào)節(jié)時間.微分作用強弱取決于微分時間的大小[1-3].
2 MATLAB 仿真
通過用 MATLAB 軟件對PID 控制仿真,并進行分析比例、積分和微分是如何影響控制過程的.
2.1 建立數(shù)學模型
設被控對象的傳遞函數(shù)為G(s) =
2.2 仿真建模
PID 控制系統(tǒng)模型[4]見圖 2.
2.3 仿真實驗
2.3.1 比例控制 圖 2 中先去掉積分和微分項,然后取不同的比例系數(shù) Kp ,進行仿真,仿真結(jié)果見圖 3.
在相同大小的干擾下,調(diào)節(jié)器的比例系數(shù)越大,則比例作用越強,
5
s(s + 5) .
圖 2 PID 控制系統(tǒng)模型
調(diào)節(jié)器的輸出越大.被控變量偏離給定值越小,被控變量被拉回到給定值需要的時間越短,系統(tǒng)的余差也
隨之減小.同時,系統(tǒng)的響應速度加快,但系統(tǒng)超調(diào)也隨之增加,隨著比例系數(shù)的增加,達到一定值時, 系統(tǒng)將趨于不穩(wěn)定.比例系數(shù)越小,則調(diào)節(jié)器的輸出變化越小,被控變量變化越緩慢,過渡過程越平穩(wěn), 但過渡時間加長,系統(tǒng)平衡時的余差就越大.
2.3.2 積分控制 圖 2 中 Kp 保持不變(本實驗取 Kp =15),去掉微分項,然后取不同的積分系數(shù) Ki ,進行仿真,觀察仿真結(jié)果,分析 Ki 的變化對控制系統(tǒng)的影響.
從圖 4 中可以看出,超調(diào)的減小、振蕩變小以及系統(tǒng)的穩(wěn)定性、響應速度取決于 Ki .隨著 Ki 增加, 積分作用不斷增強,在相同的擾動作用下,調(diào)節(jié)器的輸出增大,余差消除加快;同時系統(tǒng)的振蕩加劇,穩(wěn)定性下降. Ki 太大,還可能導致系統(tǒng)不穩(wěn)定.
1.1.1 微分控制 圖 2 中 Kp 保持不變(本實驗取 Kp =200) 去掉積分項,然后取不同的微分系數(shù) Kd ,進行仿真,觀察仿真結(jié)果,分析 Kd 的變化對控制系統(tǒng)的影響(見圖 5).
從圖 5 中可以看出,在相同輸入變量作用下,微分系數(shù)
太小對系統(tǒng)的品質(zhì)影響不大(見圖中的曲線 1).隨著微分系數(shù) Kd 增加,微分作用越強;當 Kd 適當,對于系統(tǒng)的穩(wěn)定
性、響應速度的加快以及超調(diào)量的減少都會有所改善(見圖
中的曲線 2); K 太大,反而會使系統(tǒng)不穩(wěn)定[5-7].
圖 5 微分控制的過渡曲線
注:1,2,3 條曲線分別是 Kd=0.5,3,6 的階躍響應曲線.
3 結(jié)論
PID 控制原理,通過利用 MATLAB 仿真,了解各參數(shù)的作用及對控制系統(tǒng)的影響[8-10].在整定 PID 控制器參數(shù)時,可以根據(jù)控制器的參數(shù)與系統(tǒng)動態(tài)性能和穩(wěn)態(tài)性能之間的定性關(guān)系,用實驗的方法來調(diào)節(jié)控制器的參數(shù). 如果階躍響應的超調(diào)量太大,經(jīng)過多次振蕩才能穩(wěn)定或者根本不穩(wěn)定,應減小比例系數(shù)、增大積分時間.如果階躍響應沒有超調(diào)量,但是被控變量上升過于緩慢,過渡過程時間太長,應按相反的方向調(diào)整參數(shù).如果消除誤差的速度較慢,可以適當減小積分時間,增強積分作用.反復調(diào)節(jié)比例系數(shù)和積分時間,如果超調(diào)量仍然較大,可以加入微分控制,微分時間從 0 逐漸增大,反復調(diào)節(jié)控制器的比例、積分和微分部分的參數(shù),直到滿意.
總之,PID 參數(shù)的調(diào)試是一個綜合的、各參數(shù)互相影響的過程,實際調(diào)試過程中的多次嘗試是非常重要的,也是必須的.基于 PID 控制系統(tǒng)的眾多優(yōu)點,使其成為工業(yè)生產(chǎn)中應用最為廣泛的調(diào)節(jié)器控制規(guī)律, PID 控制或是基于PID 控制的各種改進型PID 越來越得到廣泛應用,前景十分廣闊.