

超聲波流量計的自適應時延估計法研究及應用
摘 要:在利用流量計進行流量測量時, 順逆流時間差的測量精度直接影響流量計測量精度。傳統流量計多采用相關法進行時間差計算, 該方法容易受到采樣率和相關噪聲的影響。基于此, 提出了一種改進的LMS自適應時延估計, 在傳統的***小均方差時延估計的基礎上, 使用粒子群進行改進, 直接利用粒子群對延遲時間進行搜索, 改善了傳統LMS時延估計中步長因子選擇和計算量大的問題。自定義輸入信號, 分別在不同采樣率和信號加相關噪聲的情況下, 對比相關法和改進的***小均方誤差時延估計, 結果表明, 該方法不受采樣率和相關噪聲的影響。***后, 將該方法應用在超聲波流量計平臺上, 在不同的流速下進行測量, 計算精度高, 計算量小, 誤差不超過±1%。
0、引言:
隨著社會發展, 在生產生活方面, 人們對于特殊產品的需求越來越高, 例如在工業生產中的一些有毒、高腐蝕性、易燃易爆甚至含有放射性的物質液體的流體的測量, 一般的流量計無法滿足要求, 超聲波流量計應運而生。
根據測量方法的不同, 主要分為速度差法 (時差法、頻差法) 相關法、多普勒法等。目前, 多采用時差法進行測量, 在管道上下游安裝一對換能器, 分別發送、接收超聲波, 計算上下游波形時間差, 利用時間差與流體流量關系, 計算管道流體流量[1]。
時差法主要分為直接時差法、相關法等。直接時差法計算簡單, 通過設定閾值, 判斷波形到達時間, 測量順逆流時間差。但是, 因為在測量過程中接收到的超聲波有時會出現缺波、陷波的情況, 這時候利用閾值判斷波形到達時間點時就會出現一個或多個周期差。
相關法是另外一種時間差測量方法, 因為上下游波形具有一定的相關性, 兩個波形只是在時間上有一定的延遲, 計算信號的自相關函數, 根據峰值對時間延遲進行估計。這種方法簡單易懂, 容易實現。但是, 這種方法比較依賴信號和噪聲的統計先驗知識, 實際上這種先驗知識很難得到, 往往使用估計值進行替代, 所以說理論上的***優方法也只是近似實現。當輸入信號受到一些有色噪聲影響時, 相關法的估計精度也會隨之下降, 嚴重影響測量結果[2]。同時, 在數字域中, 使用相關法進行估計時, 估計精度與采樣率有關, 一般只能估計采樣率整數倍的時延值, 因此, 一般需要采樣率越高越好。但是當采樣率過高時, CPU在進行數據處理和存儲過程中, 明顯受到影響。
針對流量計在使用相關法進行測量時容易受到采樣率和相關噪聲的影響, 使用一種新的自適應時延估計方法, 利用粒子群對傳統的***小均方差估計法進行優化, 改善了傳統方法在計算量和步長因子取值上面的不足。在設計的超聲流量平臺上對該方法進行驗證, 取得了滿意的效果。
1、粒子群———LMS自適應時延估計:
在對時延估計進行研究時, 假設一個雙基元被動定位模型, 其數學表達式如式 (1) 所示[3]:

s (t) 和s (t-D) 是兩個相距為L的接收器接收到的目標信號, n1 (t) 和n2 (t) 是在傳播過程中受到環境影響產生的噪聲, D為兩個接收器收到信號的延遲時間。
對s (t) 、s (t-D) 做傅里葉變換, 如下所示:
同時, 將exp (-j2πf D) 看做是一個相移濾波器, 即:

這時候, x1、x2間時延值就可以看做輸入信號經過一個傳遞函數H (f) 的結果。
對于離散系統, 有:

其中:

1.1 經典LMS時延估計
傳統的LMS自適應算法使用一個有限階數M來代替無限時理想情況, 把對時間延遲的估計轉換為對這個有限脈沖響應的濾波器的參數估計問題[4], 采用***小均方準則的自適應***小均方算法 (LMSTDE) 進行迭代。
具體過程如下[5]:
該方法結構簡單, 使用方便, 但是計算量比較大, 并且步長因子u的選擇與收斂速度和穩態誤差存在一定的矛盾。
1.2 改進的自適應時延估計
基于此, 提出一種新的自適應時延估計算法, 利用粒子群自適應搜索時延值, 每一個粒子代表一個時延值, 在迭代過程中, 不斷更新, 判斷個體的***優解和全局***優解, 并經過有限次迭代, 全局收斂, 此時, 粒子集中在***優解附近, 獲得的***優值即為時延值。
具體實現過程如下[6]:
(1) 選擇合適的初始粒子群并設置參數
為了更好地對時延值進行搜索, 預先根據管道參數的設置, 利用流量計算公式, 計算超聲波在靜止水流中到達時間, 以及***大流速下順逆流時間, 在該時間域內選取粒子群的初始值。
(2) 粒子群的迭代
根據式 (6) 、式 (7) , 在離散系統中, 具有延遲的信號可以表示為:

基于此, 直接利用PSO對D進行搜索, 判斷使e (n) ***小時, 對應的D。

根據粒子群的速度、位置更新公式 (15) 更新粒子位置, 計算新粒子的e (n) , 比較所有粒子, 獲得本次迭代過程中使e (n) ***小的粒子位置, 并與上次迭代進行對比, 將兩者e (n) ***小對應的粒子作為當前***優粒子。

(3) 判斷粒子群是否達到設置的***大迭代次數, 或者e (n) 的精度是否達到設定的精度范圍內, 如果是, 則停止迭代, 選出***好的粒子位置和適應值;若否, 返回步驟 (2) 。
1.3 性能分析與結果驗證
1.3.1 性能分析
(1) 簡化計算量
使用LMSTDE時延估計時, LMSTDE算法在迭代過程中需要對每個時延值進行搜索[7], 乘法運算量為2M·itr+M, 而PSO優化算法將對時延值進行搜索的過程由固定搜索變為隨機搜索, 在更新粒子過程中, 運算次數為N·max DT, 適應度函數乘法計算量為2M, 所以在尋找D的工程中,**新方法的乘法計算量為2MN·max DT。
其中itr為輸入變量長度, N為粒子個數, max DT為***大迭代次數, M為濾波器的階數。
一般來說N·max DT遠遠小于itr, 所以新算法降低了計算量。
同時, 在對粒子群進行初始化時, 根據管道參數, 計算水流靜止時波形預計到達時間和***大流速下順流和逆流到達時間, 將該時間范圍作為粒子群的初始化范圍, 再次降低搜索量, 降低計算量。
(2) 穩態誤差、收斂速度不受u取值影響
使用LMSTDE進行時延估計時, 有:

式中:I為單位陣, R為x1的自相關陣, P為x1與x2的互相關向量。
定義權值誤差矢量:
利用上式獲得誤差矢量:

利用R=QΛQΤ分解R, v' (n) =QΤv (n) , 上式可以轉換為:

假設v' (n) 有初始值v' (0) , 則:

為了對濾波器的收斂速度進行說明, 這里引入一個時間常數。時間常數定義為第k個 減小到vk (0) 的 倍所需的迭代次數, 即
減小到vk (0) 的 倍所需的迭代次數, 即
很明顯, 隨著u的增大, τk減小, 濾波器更快地收斂, 即u越大, 收斂速度越快。
此外, 引入失調量M, 根據Widrow推導的經典LMS算法理論:
式中:tr[R]為輸入信號的總功率, Jmin為維納解所獲得的***小均方誤差, Jex為均方誤差***終值與Jmin之差。
隨著u值地增大, M變大, 系統的穩態誤差也變大。
綜上所述, u值越大, 算法收斂速度加快, 但是穩態誤差卻隨之下降[8]。使用PSO進行估計, 將傳統LMSTDE通過步長因子u的選取, 更新權值wi對時延值進行搜索的過程轉換為直接對時延值進行搜索。該過程無須設置步長因子u, 避免了因步長因子的選擇不當而造成算法性能下降。
1.3.2 結果驗證
為了驗證優化后時延估計的正確性, 假設輸入兩個正弦信號x, y, 兩路信號在時間上延遲5×10-8, 采樣頻率為500×106Hz, 粒子群初始范圍為21~29。
使用PSO對LMS進行優化, 尋找使信號誤差***小時對應的D。從圖1、圖2可以看出, 經過15次迭代, 算法收斂, 誤差基本達到零, 時延估計值為4.933×10-8。利用PSO搜索時延值, 計算量小, 結果。
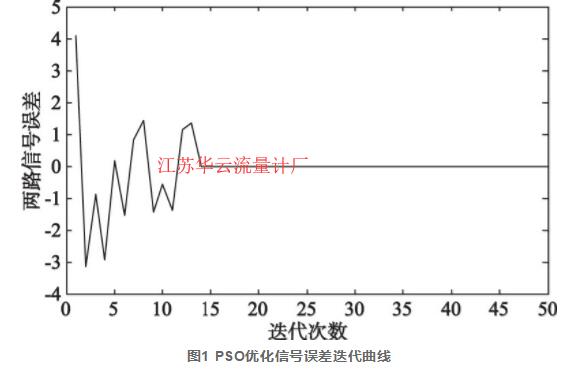
圖1 PSO優化信號誤差迭代曲線
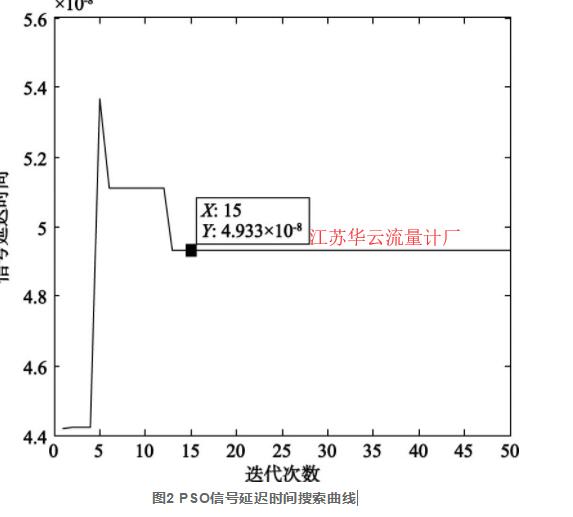
圖2 PSO信號延遲時間搜索曲線
2、相關法與改進的LMS性能對比:
在引言中已經提到過, 目前在超聲波流量計中進行時間差測量的方法多為閾值法和相關法, 閾值法誤差較大, 相關法相對比較, 但是相關法在進行時延估計時, 首先需要假設信號與噪聲不相關, 噪聲與噪聲不相關。但是在實際環境中, 存在各種各樣的相關噪聲, 這種情況下, 嚴重影響測量精度, 因此, 一般需要對噪聲進行處理, 或者尋找新的方法進行時延估計[9]。
同時, 相關法在利用互相關峰, 判斷時延值時, 時延時間需要為采樣時間的整數倍, 并且其計算精度與fs相關, fs越高, 時延時間越。
使用PSO進行時延估計時基本不受這兩方面的影響。為了驗證這一結論, 假設兩個正弦信號x (t) , y (t) 作為輸入, 分別從有色噪聲和不同采樣率兩種情況下, 對相關法和優化后的LMS時延法進行對比。
2.1 有色噪聲下性能對比
在測試之前, 自定義一個高斯白噪聲ξ (k) , E (ξ) 為0, δ2 (ξ) 為1, 將其加在信號x (t) 上面, 有色噪聲如下所示:

加在y (t) 上, 加入噪聲后兩路信號如圖3所示。
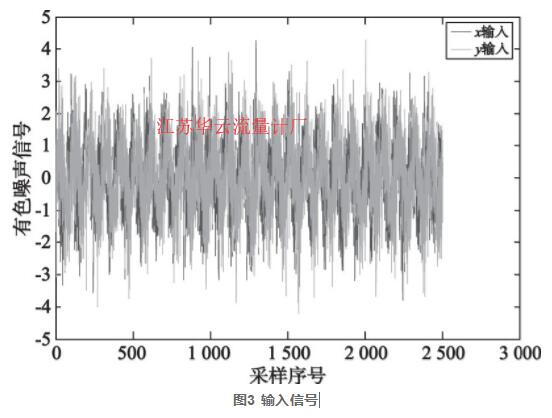
圖3 輸入信號
分別使用相關法和粒子群優化后的LMS時延估計對在噪聲影響情況下的兩路信號的時延值進行估計, 單次測量結果如圖4、圖5所示。
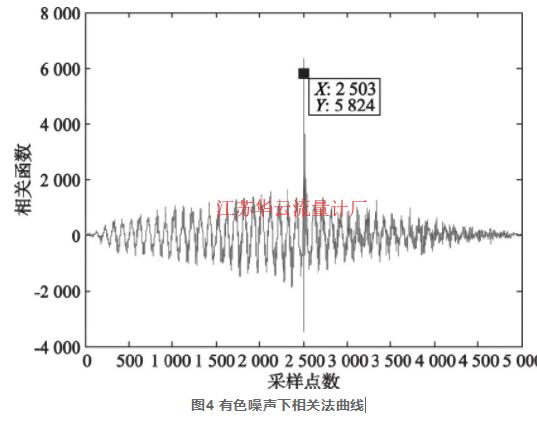
圖4 有色噪聲下相關法曲線
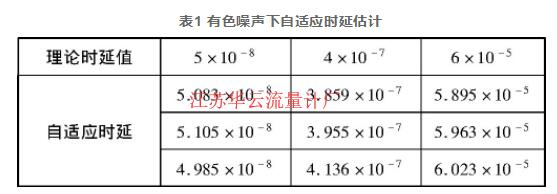
假設兩路信號時間上延遲5×10-8, 相關法進行估計時, 采樣數N為2 500, 采樣頻率fs為500×106Hz, 則時延值為4×10-9, 使用PSO進行時延估計時, 時延值為5.083×10-8。使用不同的時延值, 利用PSO進行驗證, 結果如表1所示。很明顯, 當給信號加入相關噪聲時, 粒子群優化時延估計值基本不受相關噪聲的影響。
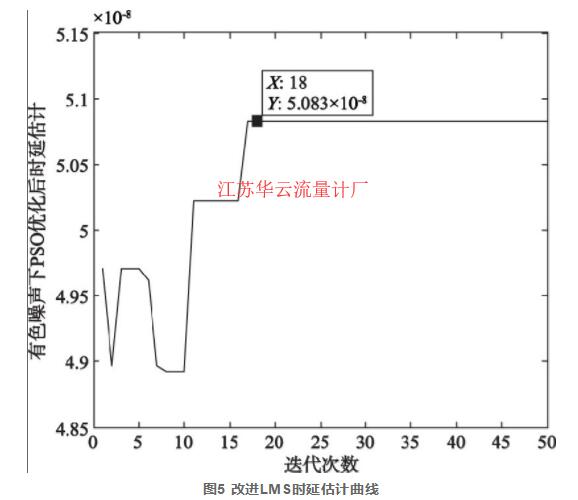
圖5 改進LMS時延估計曲線
表1 有色噪聲下自適應時延估計
2.2 低采樣率情況下性能對比
假設兩路信號在時間上延遲0.31, 采樣頻率為399 Hz, 單次測量如圖6、圖7所示。
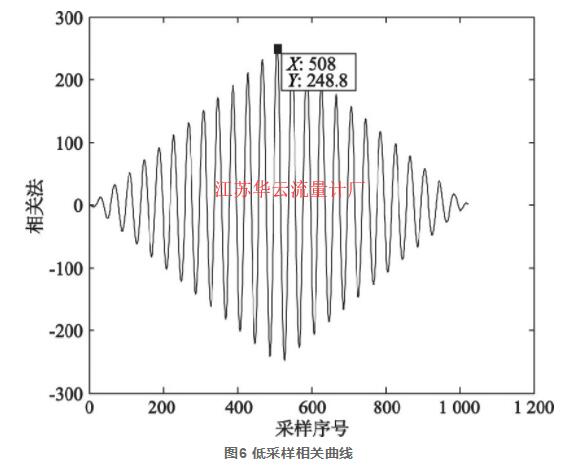
圖6 低采樣相關曲線
使用相關法進行估計時時延值為0.01, 而PSO優化后時延值為0.307 7。為了驗證該理論的正確性, 分別采取不同的采樣率進行驗證, 結果如表2所示。很明顯, 當采樣值不是時延值的整數倍時, 改進的自適應時延法時延估計不受采樣值影響。
表2 不同采樣率下自適應時延估計
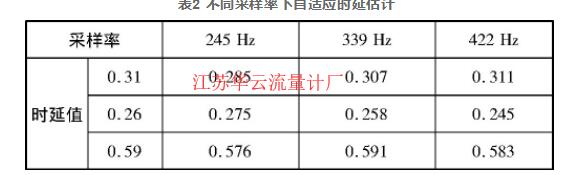

圖7 低采樣LMS信號延遲時間曲線
3、改進的自適應時延估計在超聲波流量計上的應用:
3.1、應用背景:
為了進一步驗證新方法的可行性, 在流量平臺上對不同流速下的管道流量進行測量。
在測量之前, 首先需要了解其硬件結構, 一般來說, 其硬件主要包含信號控制采集處理、顯示、鍵盤、輸出功能。信號控制采集處理由超聲模擬前端、高速數據采集、數據處理部分組成。硬件結構框架如圖8所示。
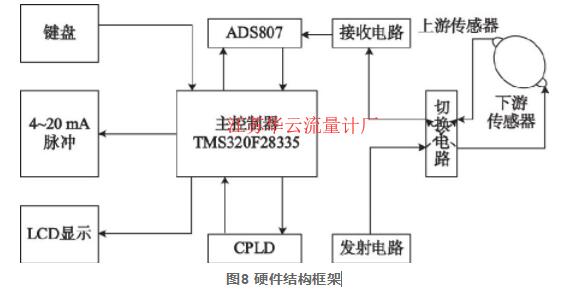
圖8 硬件結構框架
3.2 改進的LMS應用及驗證
在上述硬件設計的基礎上搭建流量計模型, 并在水流測量平臺上進行測試, 其中管道內徑為D=5 cm, 管壁厚度l=3.5 mm, 換能器聲鍥聲速ca=2 460 m/s, 換能器入射角θ=45°, 單只換能器聲鍥延遲ta=4μs, 換能器出射面中心到換能器外緣的距離P=15.2 mm。管道橫波聲速c1=3 200 m/s, 縱波聲速c2=1 450 m/s, 實驗結果如表3所示。
表3 單通道流量數據

為了更加直觀觀察時延值, 將流速為1.5 m/s時超聲波順逆流波形采樣點導入MATLAB中, 并分別利用相關法和改進的LMS進行處理。其中, 采樣率fs為500 Hz, 圖9為超聲波流量計在流速為1.5 m/s時采樣得到的順逆流波形。

圖9 順逆流波形曲線
經計算, 時延理論值為0.04。利用相關法進行測量時, 實驗結果如圖10所示, 時延值為0.038。圖11為改進的LMS測量時延值, 時延值為0.039, 很明顯, 該方法測量結果更接近理論值, 進一步驗證了結果的準確性。
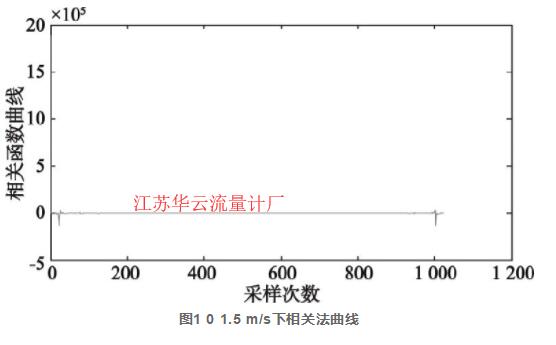
圖1 0 1.5 m/s下相關法曲線
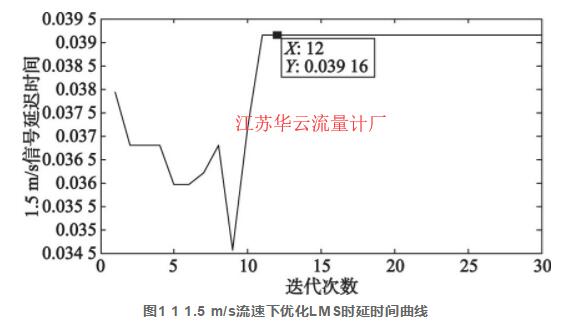
圖1 1 1.5 m/s流速下優化LMS時延時間曲線
4、結束語:
本文通過對LMSTDE算法進行分析, 發現在利用LMSTDE進行時延估計時, 計算量大, 且u的取值無法確定, 基于此, 提出了PSO對該算法進行改進, 并將該方法應用在超聲波流量計流量測量中, 經驗證, 測量精度高, 誤差在±1%左右, 滿足設計要求。